of colors from 19 to 17. And in fact in the early 1970s, it was already known that cellular automata with 18 colors and nearest-neighbor rules could be universal. In the late 1980s—with some ingenuity—examples of universal cellular automata with 7 colors were also constructed.
But such rules still involve 343 distinct cases and are by almost any measure very complicated. And certainly rules this complicated could not reasonably be expected to be common in the types of systems that we typically see in nature. Yet from my experiments on cellular automata in the early 1980s I became convinced that very much simpler rules should also show universality. And by the mid-1980s I began to suspect that even among the very simplest possible rules—with just two colors and nearest neighbors—there might be examples of universality.
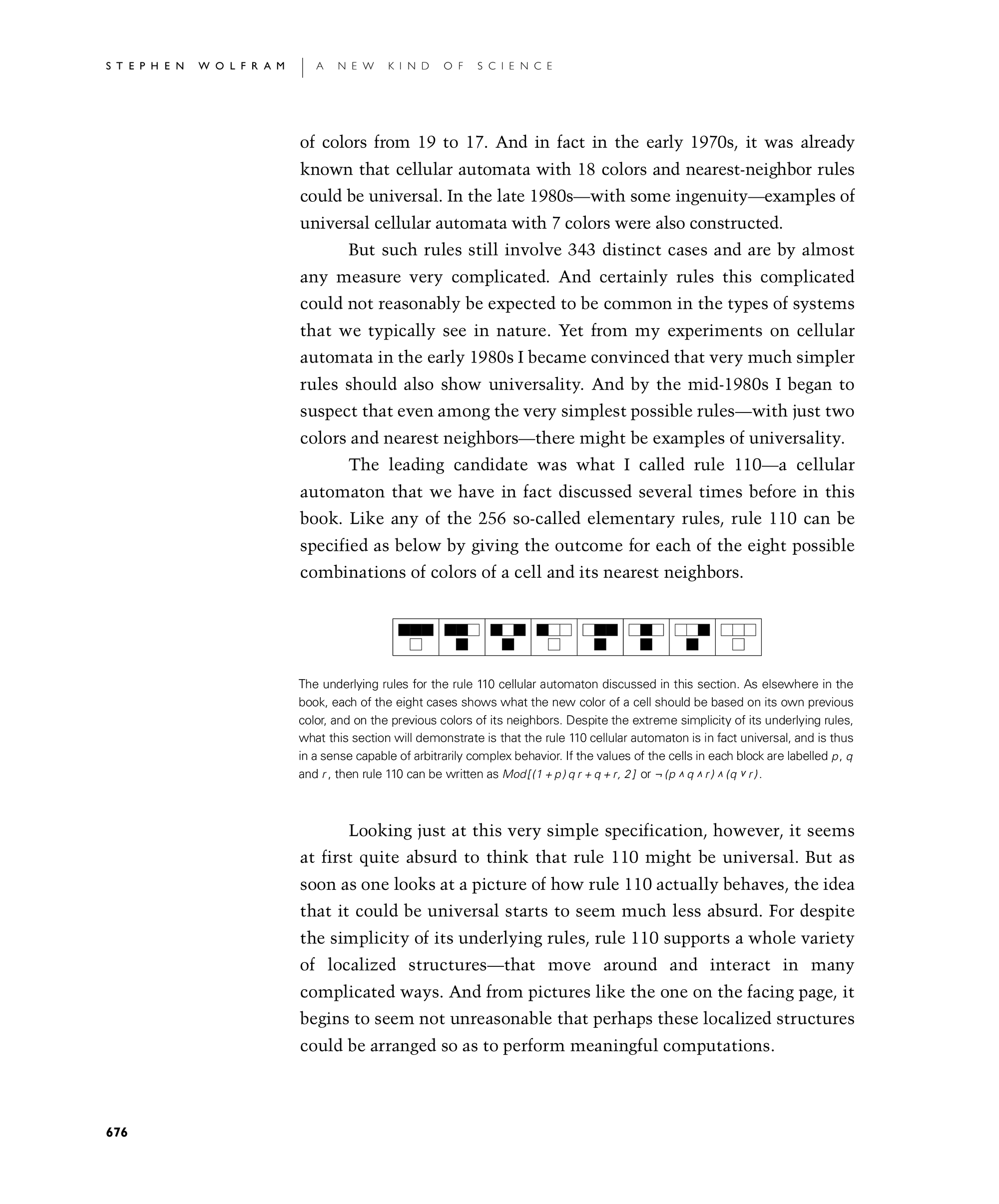
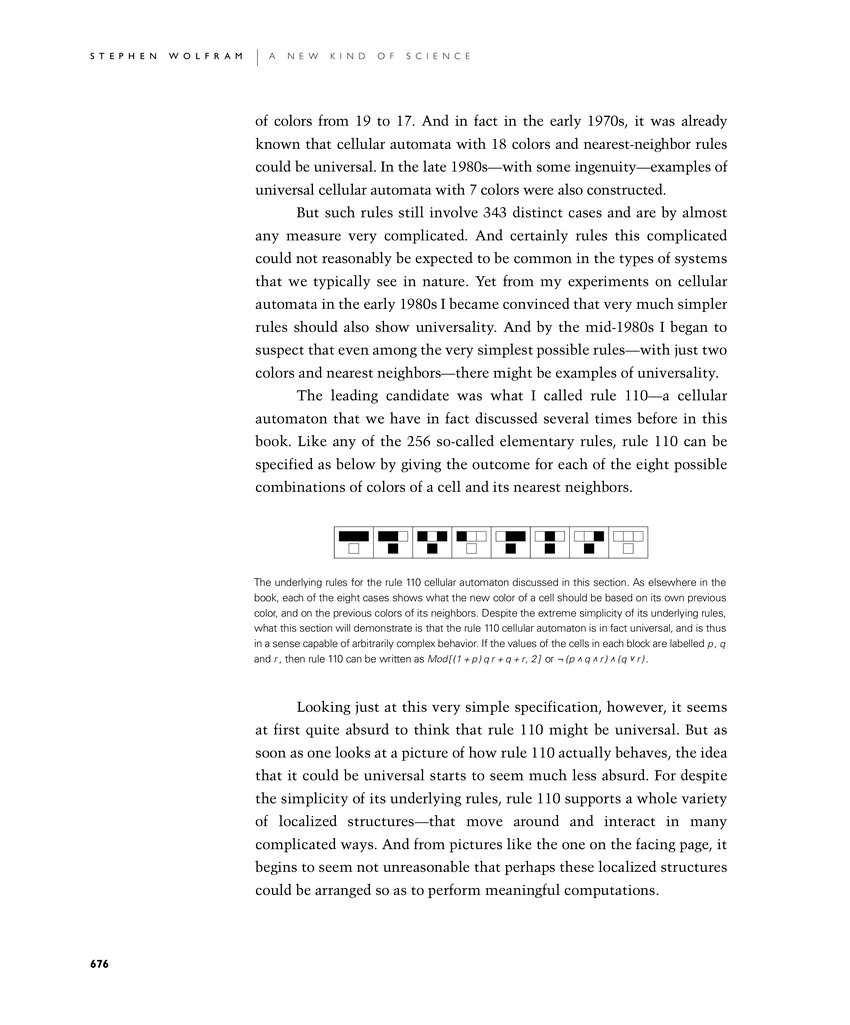
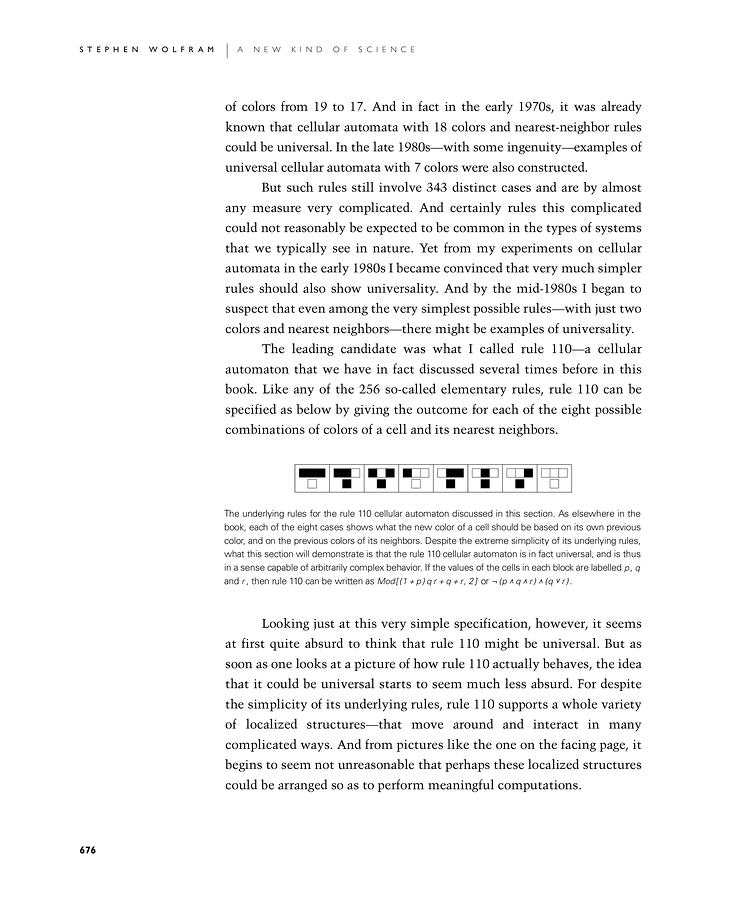
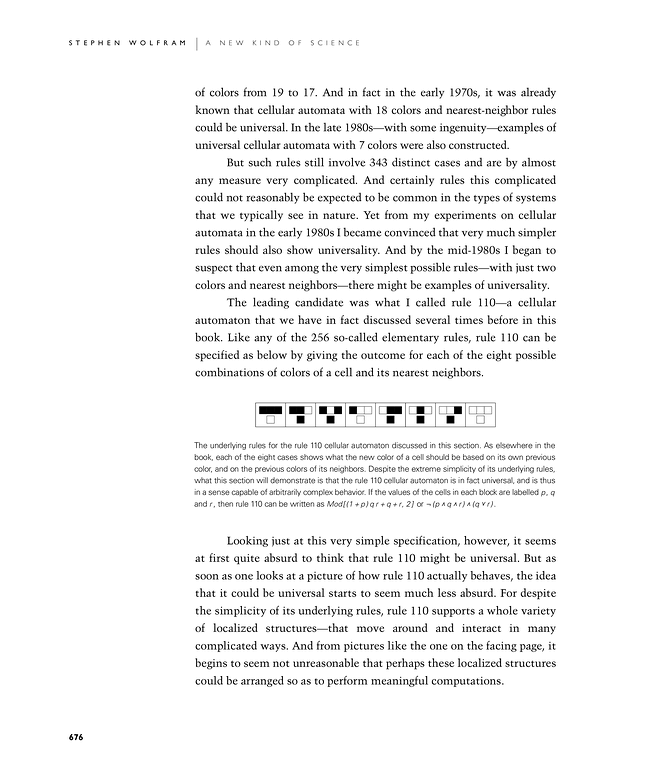
The leading candidate was what I called rule 110—a cellular automaton that we have in fact discussed several times before in this book. Like any of the 256 so-called elementary rules, rule 110 can be specified as below by giving the outcome for each of the eight possible combinations of colors of a cell and its nearest neighbors.
Looking just at this very simple specification, however, it seems at first quite absurd to think that rule 110 might be universal. But as soon as one looks at a picture of how rule 110 actually behaves, the idea that it could be universal starts to seem much less absurd. For despite the simplicity of its underlying rules, rule 110 supports a whole variety of localized structures—that move around and interact in many complicated ways. And from pictures like the one on the facing page, it begins to seem not unreasonable that perhaps these localized structures could be arranged so as to perform meaningful computations.

The underlying rules for the rule 110 cellular automaton discussed in this section. As elsewhere in the book, each of the eight cases shows what the new color of a cell should be based on its own previous color, and on the previous colors of its neighbors. Despite the extreme simplicity of its underlying rules, what this section will demonstrate is that the rule 110 cellular automaton is in fact universal, and is thus in a sense capable of arbitrarily complex behavior. If the values of the cells in each block are labelled p, q and r, then rule 110 can be written as Mod[(1+p) q r + q + r, 2] or And[Not[And[p, q, r]], Or[q, r]].