Turing Machines
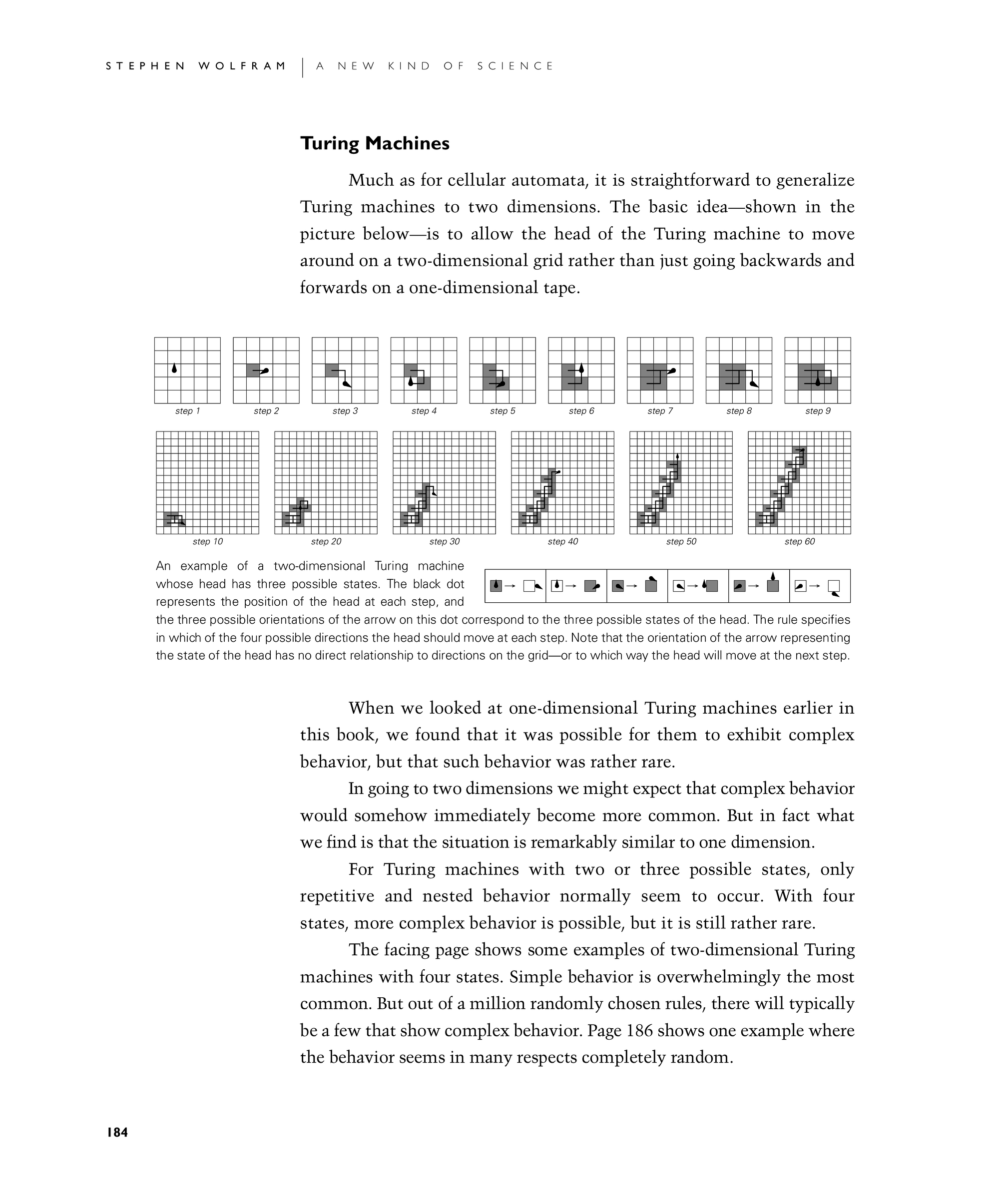
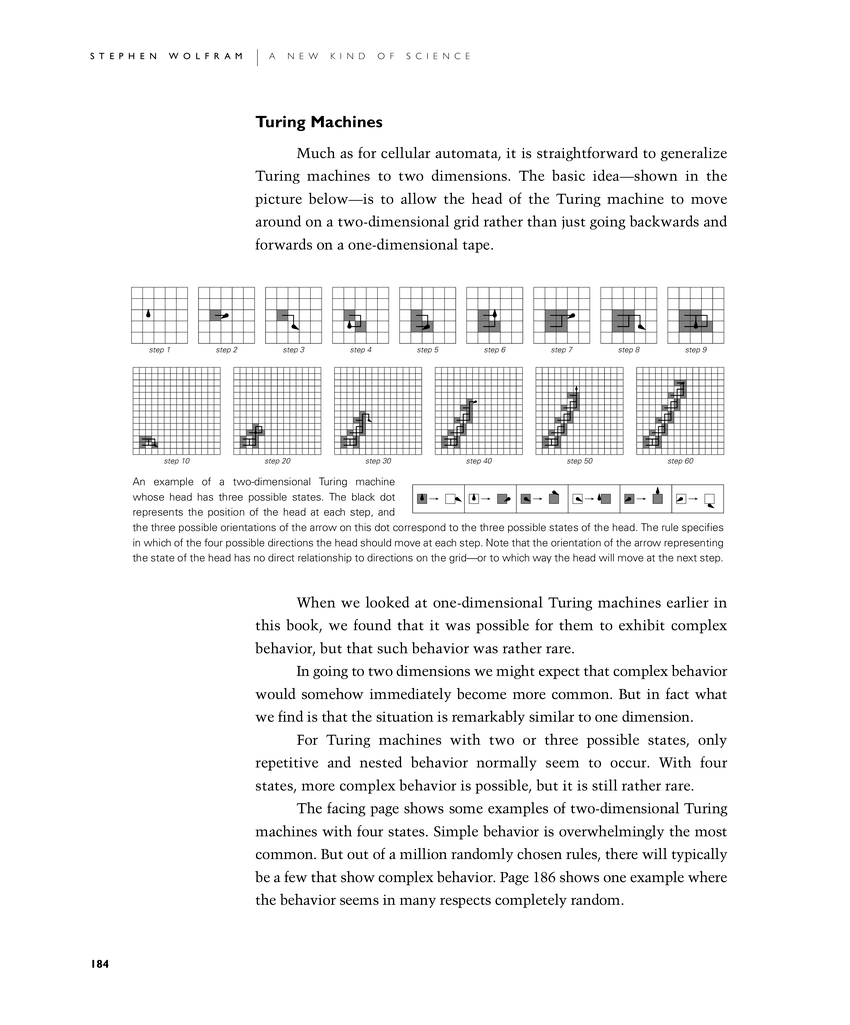
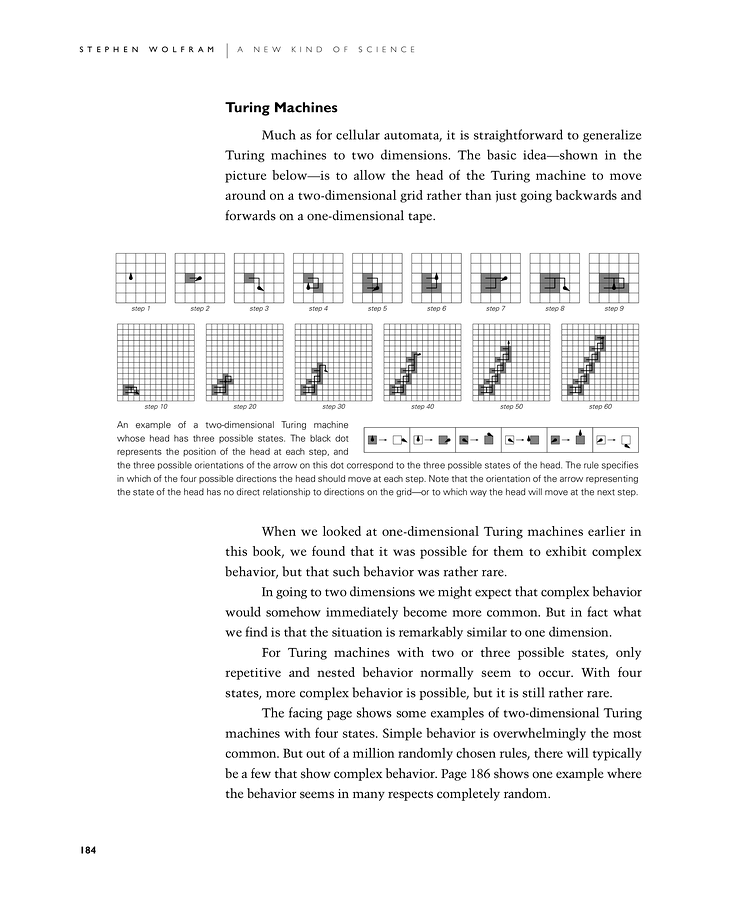
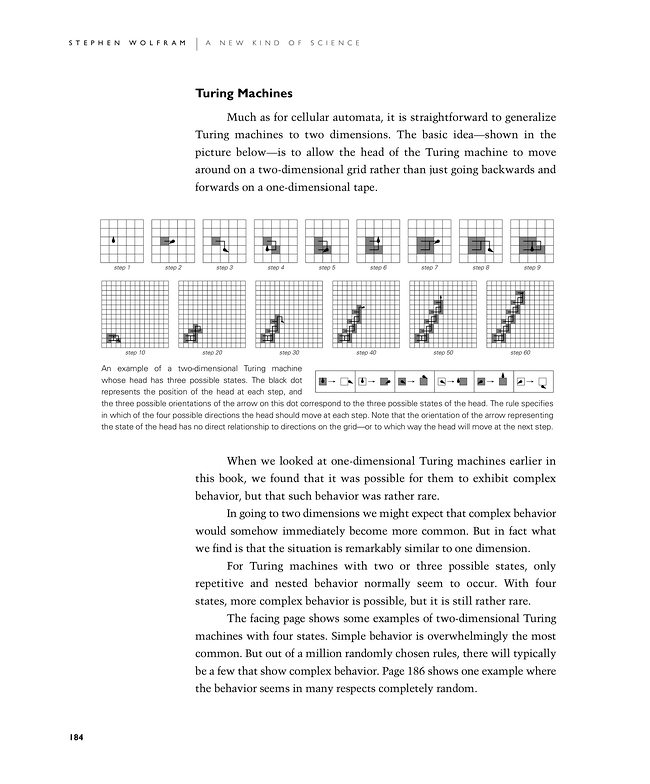
Much as for cellular automata, it is straightforward to generalize Turing machines to two dimensions. The basic idea—shown in the picture below—is to allow the head of the Turing machine to move around on a two-dimensional grid rather than just going backwards and forwards on a one-dimensional tape.
When we looked at one-dimensional Turing machines earlier in this book, we found that it was possible for them to exhibit complex behavior, but that such behavior was rather rare.
In going to two dimensions we might expect that complex behavior would somehow immediately become more common. But in fact what we find is that the situation is remarkably similar to one dimension.
For Turing machines with two or three possible states, only repetitive and nested behavior normally seem to occur. With four states, more complex behavior is possible, but it is still rather rare.
The facing page shows some examples of two-dimensional Turing machines with four states. Simple behavior is overwhelmingly the most common. But out of a million randomly chosen rules, there will typically be a few that show complex behavior. Page 186 shows one example where the behavior seems in many respects completely random.


An example of a two-dimensional Turing machine whose head has three possible states. The black dot represents the position of the head at each step, and the three possible orientations of the arrow on this dot correspond to the three possible states of the head. The rule specifies in which of the four possible directions the head should move at each step. Note that the orientation of the arrow representing the state of the head has no direct relationship to directions on the grid—or to which way the head will move at the next step.