
Four Classes of Behavior
In the previous section we saw what a number of specific cellular automata do if one starts them from random initial conditions. But in this section I want to ask the more general question of what arbitrary cellular automata do when started from random initial conditions.
One might at first assume that such a general question could never have a useful answer. For every single cellular automaton after all ultimately has a different underlying rule, with different properties and potentially different consequences.
But the next few pages [232, 233, 234] show various sequences of cellular automata, all starting from random initial conditions.
And while it is indeed true that for almost every rule the specific pattern produced is at least somewhat different, when one looks at all the rules together, one sees something quite remarkable: that even though each pattern is different in detail, the number of fundamentally different types of patterns is very limited.
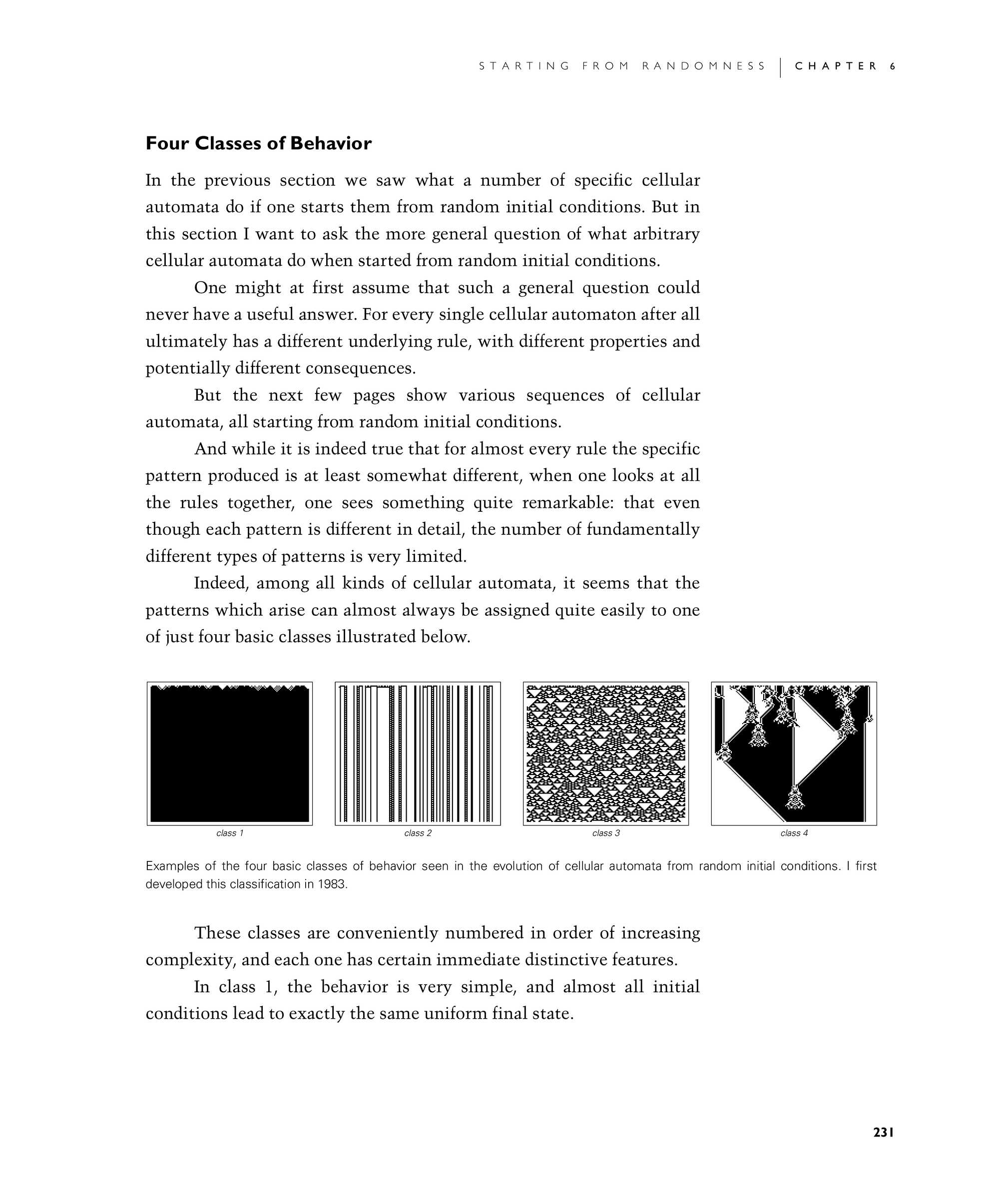
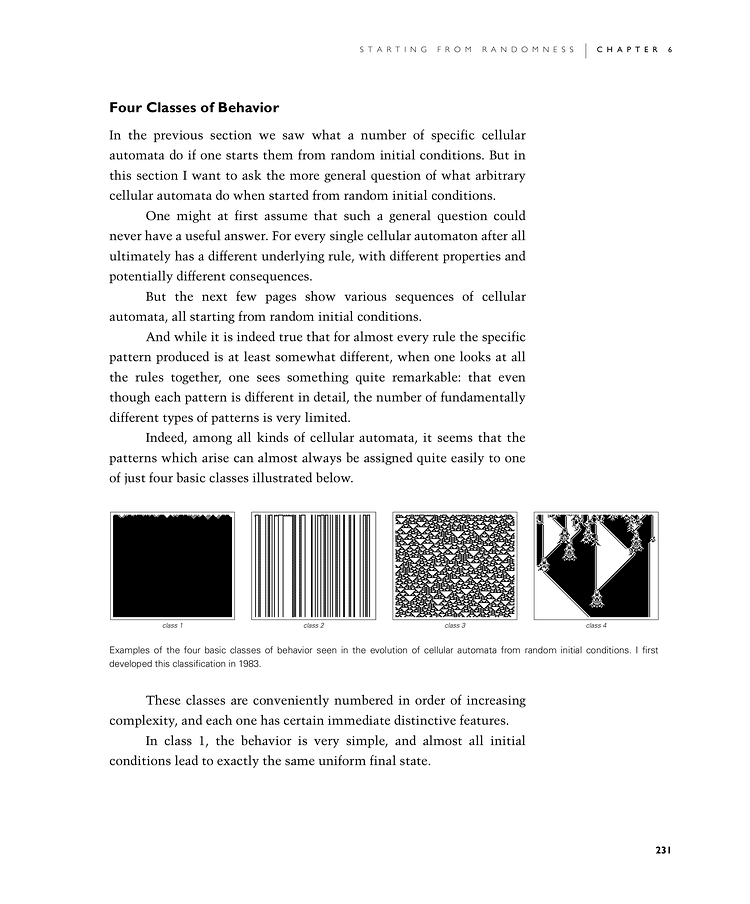
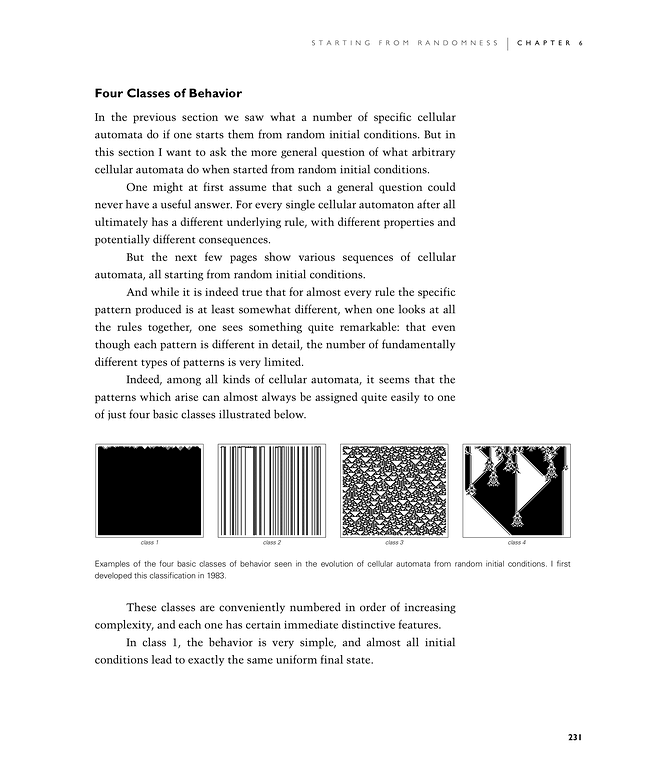
Indeed, among all kinds of cellular automata, it seems that the patterns which arise can almost always be assigned quite easily to one of just four basic classes illustrated below.
These classes are conveniently numbered in order of increasing complexity, and each one has certain immediate distinctive features.
In class 1, the behavior is very simple, and almost all initial conditions lead to exactly the same uniform final state.
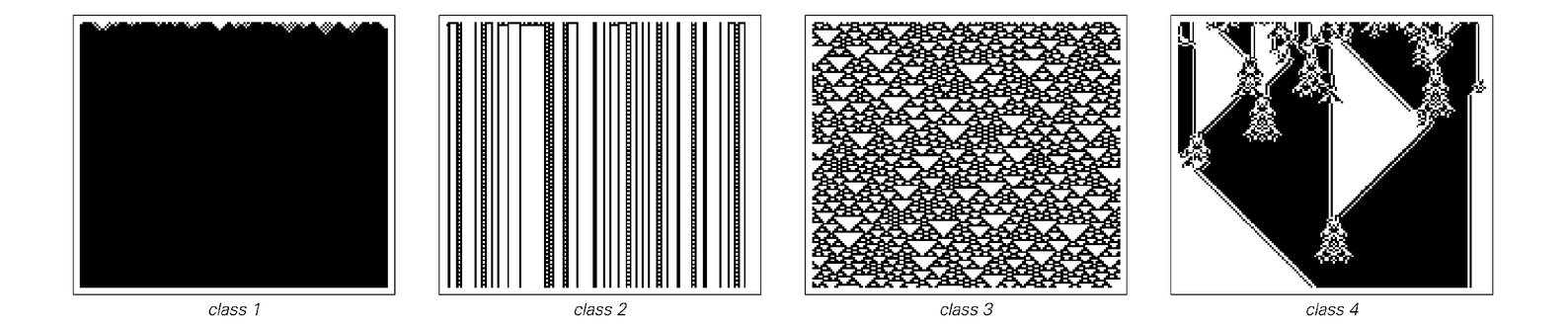
Examples of the four basic classes of behavior seen in the evolution of cellular automata from random initial conditions. I first developed this classification in 1983.